摘要:本文深入分析了闭环光纤陀螺内部数据处理流程和工作原理,建立了闭环光纤陀螺的数学模型。以某型光纤陀螺仪实际设计参数为依据,模拟产生了大角速度条件下的陀螺输出数据,与试验测试数据一起进行了FFT频谱和功率谱的对比分析,结果表明大角速度下陀螺毫秒输出数据必然存在周期性尖峰波动。进一步对其产生原因进行分析和验证,并提出了针对性解决措施,对光纤陀螺仪性能提升和工程应用具有实际指导意义。
主题词:光纤陀螺 特性分析 频率分析
1、引言
三轴光纤陀螺仪应用于惯性测量装置或导航系统时,通常需要惯性系统提供精确的定时基准信号。当三轴光纤陀螺仪接收到定时基准信号后,迅速将当前各轴角速度测量结果发送到惯性系统。该定时基准信号的周期通常是毫秒量级的,角速度测量结果基本上是实时反映载体的运动状态,其噪声、带宽等直接影响系统的制导控制精度。因此,需要对陀螺输出数据特性进行详细分析与研究。
2、工作原理分析
当载体绕垂直于光纤环平面的轴旋转时,根据萨格奈克效应,光纤环中沿顺时针和逆时针方向传播的两束光就会产生与旋转角速率成正比的相位差。该相位差可通过探测器检测两束光的干涉条纹来进行测量。该检测信号经放大滤波、A/D转换、數字解调等处理后,得到与旋转角速率成正比的信号(反馈数字量),经过D/A转换后施加在Y波导的调制电极上,使两束反向传播光波之间产生一个反馈相移,其大小与萨格奈克相移幅值相等、符号相反,从而使干涉光波之间的总相位差始终是零。此时,反馈数字量即可作为光纤陀螺仪的输出[1]。
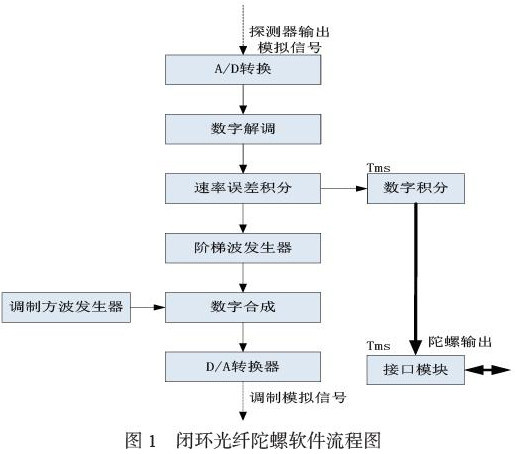
闭环光纤陀螺软件工作流程共包括A/D转换、数字解调、速率误差积分、阶梯波发生器、调制方波发生器、数字合成、D/A转换、数字积分(微秒数据变换毫秒数据)、数据输出等过程,其原理框图如图1所示。其中A/D转换、阶梯波发生器、调制方波发生器、数字合成、D/A转换以τ(光纤环渡越时间)为周期进行更新;数字解调、速率误差积分以2τ(光纤陀螺调制周期)为周期进行更新;数字积分和数据输出以外部定时基准(Tms)为周期。
3、仿真分析与试验验证
根据理论分析,对某型三轴光纤陀螺仪进行了数学建模,模拟产生了固定角速度下各轴光纤陀螺的理论输出。为了避免各轴因调制周期相同带来的同频干扰,该型陀螺的各轴光纤长度被设计成不同值,其对应的调制周期分布在2.3us~2.38us之间。
选取002#产品,利用数学模型模拟产生了外部输入角速度为150°/s时三轴光纤陀螺仪的理论输出数据,并与转台实测数据进行了对比。Z轴陀螺输出的FFT频谱分析、功率谱分析及陀螺输出波形的对比结果见图2,其中从左到右依次是FFT频谱图、功率谱分析图和陀螺输出毫秒周期数据波形图。分析数据长度为800个毫秒周期数据,陀螺输出毫秒周期数据波形图中显示100个毫秒周期数据。
图2的理论仿真分析与试验测试结果对比表明,在大角速度下各轴光纤陀螺毫秒周期数据均存在周期性的尖峰波动,该波动的周期与光纤环渡越时间有关,其幅度为光纤陀螺仪内标度因数乘以输入角速度。
进一步分析表明,周期性尖峰波动产生的原因是定时基准周期无法被光纤陀螺调制周期整除,导致在毫秒周期中累加的微秒周期数据次数有所不同。在小角速度时,单次微秒周期数据本身较小,多累加或少累加一次影响不大,其波动已经淹没在陀螺数据本身的噪声当中,影响基本可以忽略。随着输入角速度的增加,单次微秒周期数据成比例地增大,其带来的波动幅度更大,影响也更加明显。
从002#产品Z轴陀螺不同角速度条件下试验测试数据的FFT频率分析结果(图3)可以看出:小角速度时,基本观察不到高频周期性波动(图11(a~b));当输入角速度达到4°/s时,可以从频谱图上观察到明显的周期性频率成分(约270Hz)(图3(C)),但强度仍小于其他低频外部干扰;当角速度为30°/s~600°/s时,周期性尖峰波动成为最大频谱分量(图11(d~h)),且各不同输入角速度条件下,频谱图基本一致,从而证明了上述理论分析的正确性。
a(从上到下:0°/s;-0.5°/s;-4°/s;-30°/s) b(从上到下:-60°/s;-150°/s;-300°/s;-600°/s)
(从左至右:FFT频率图、功率谱、陀螺输出)
5、改进措施
由于该周期性尖峰波动是向下抽取环节实现微秒数据向毫秒数据转换时引入的,因此无法通过优化闭环反馈控制环节的带宽进行抑制。另外,波动的周期是由外部定时基准周期及精度、光纤陀螺调制周期及精度、电路时序漂移、信号传输延迟等多重因素共同决定,具有不确定性,无法通过平滑滤波等措施进行抑制。即使通过最精确的匹配设计,也无法保证外部定时基准周期能够被光纤陀螺调制周期整除,而且在某种情况下还可能导致极低频率周期性尖峰波动的出现,更加不利于惯性系统对陀螺数据的处理。
根据上述分析,可采取以下措施可以对陀螺性能进行改善:增加微秒周期数据累加计数器,通过将微秒周期数据累加结果除以累加次数,计算出该段时间内的平均微秒周期数据作为光纤陀螺仪的测量结果对外输出,从而避免陀螺输出数据出现周期性尖峰波动。此时,光纤陀螺仪输出环节原理框图如图4所示。
6、结论
本文从光纤陀螺工程应用实际出发,深入分析光纤陀螺内部数据处理过程、各环节工作原理等,结合某型三轴光纤陀螺仪的实际设计参数建立数学模型,并将陀螺输出数据的模拟仿真结果与实测数据进行对比,结果表明在大角速度下各轴光纤陀螺毫秒周期数据均存在周期性的尖峰波动。最后根据该波动产生的原因提出了解决措施,对光纤陀螺仪性能提升和工程应用有实际指导意义。
参考文献
[1] 张维叙 著.光纤陀螺及其应用[M],北京:国防工业出版社,2008.5
[2] 张桂才 著.光纤陀螺原理与技术[M],北京:国防工业出版社,2008
[3] 王巍 著.干涉型光纤陀螺技术[M],北京:中国宇航出版社,2010
[4] Alan V. Oppenheim,Alan S. Willsky著.信号与系统[M],北京:清华大学出版社,2001